Em 1925 já se falava em carro autônomo…
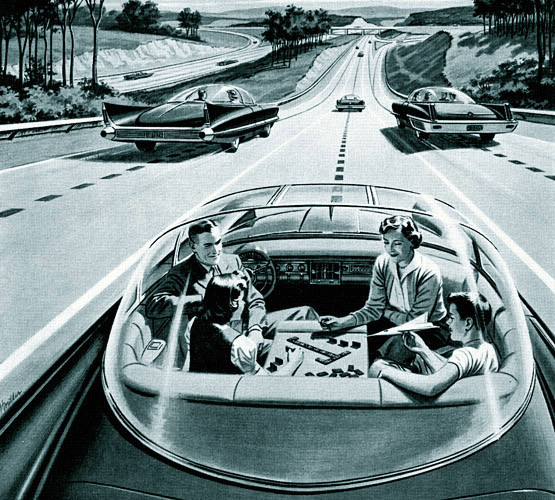
Imagine esta cena: são 7 horas da manhã e você está a caminho do trabalho.Você pega sua pasta, sai da casa e entra no carro. Pressiona um botão e fala: “Ok, leve-me ao escritório”. Seu carro segue uma rota, considerando em quais estradas o tráfego está mais tranquilo. No banco de trás -não há assento do motorista- você tem tempo para preparar seus documentos, beber seu café da manhã ou navegar nos seus sites preferidos, enquanto o carro se dirige -com segurança, defensivamente e com o limite de velocidade exato- para o seu escritório.
Durante décadas, isto foi pura ficção científica, mas os carros autônomos estão começando a se tornar realidade. Com o Google, Apple, Tesla e outros trabalhando ativamente em seu desenvolvimento, poderemos ter um em nossa garagem em 1925, no mais tardar. Ou seja, em oito anos.
Mas os veículos sem motorista têm uma história que começa muito antes do Google e um futuro que envolve mudanças na legislação de cada país, testes e mais testes e uma mudança cultural fascinante.
Antes de entrarmos em detalhes, confira na ilustração abaixo o caminho percorrido até agora pelo carro autônomo:

Os primeiros carros sem motorista já mostraram a cara já na década de 1920, embora não fossem veículos autônomos como os que vemos hoje. Embora eles dispensassem o “motorista”, esses veículos dependiam de recursos externos especiais.

O desenvolvimento ambicioso desta idéia continuou na década de 1960, incluindo projetos da Ohio State University, governo dos Estados Unidos e da Bendix Corporation. Todos esses projetos envolveram estradas “eletrônicas”, projetadas para fornecer condições para um carro sem condutor.
No Reino Unido, o governo também realizou pesquisa “drive-by-wire”, desenvolvendo carros que poderiam se mover a 130 km/h sobre uma estrada em Crowthorne, em 1969.
O veículo autônomo foi mais eficiente do que outro conduzido por um motorista humano em testes, e relatórios previam que a tecnologia poderia prevenir 40% dos acidentes rodoviários. Apesar destas reivindicações, no entanto, as estradas eletrônicas nunca se tornaram suficientemente difundidas para permitir a adoção pública deste tipo de carro sem motorista.
Naquela época, os sistemas autônomos começaram a existir sob a forma de automação específica da função. O cruise control, ou controle de velocidade de cruzeiro, foi introduzido no Chrysler Imperial de 1958, permitindo que os veículos mantivessem a velocidade sem interferência do motorista.
Em 1971, os sistemas anti-bloqueio de freios (ABS) foram implementados pela primeira vez em automóveis, novamente no Imperial, depois de serem usados em aviõess desde 1929.
Era o sistema Sure-Brake, capaz de monitorar a velocidade da roda, analisar esses dados para detectar a possibilidade de travamento e relançar comandos para um modulador hidráulico, no mesmo modelo de automação que seria usado em inúmeras aplicações, incluindo a condução autônoma. Esses sistemas automatizados colocam veículos no Nível 1 do sistema de classificação da NHTSA para veículos autônomos .
Também foi desenvolvido durante os anos 1960 e 1970 o Stanford. Inicialmente um projeto de veículo para rodar na Lua, a equipe do Stanford Cart foi pioneira na tecnologia de processamento de vídeo que, mais tarde, seria usada para fornecer informações aos veículos autônomos. Equipado com uma câmera de televisão giratória, o veículo processaria imagens 10 a 15 minutos cada vez que se movia por um metro.
Isso permitiu que ele navegasse lentamente em torno de obstáculos sem qualquer interferência humana. Em 1979, o Stanford Cart cruzou de forma autônoma um quarto cheio de cadeiras em cerca de cinco horas.
Esses caminhos separados logo começaram a convergir numa mesma direção.
O final dos anos 1970 a 1980 viu os primeiros carros autônomos do tipo que conhecemos hoje: veículos autônomos equipados com sensores, processadores e comandos necessários para se moverem, teoricamente, através do tráfego típico sem interferências externas especiais.
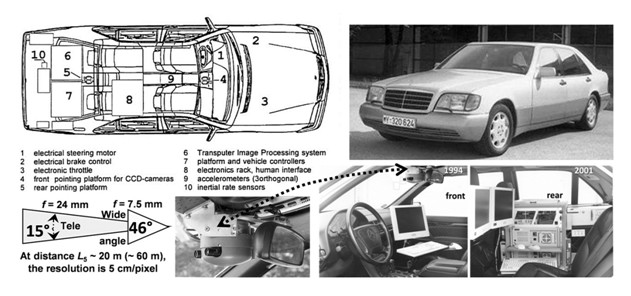
Ernst Dickmanns, pioneiro em carros autônomos e professor na Universidade da Bundeswehr, liderou uma equipe que preparou uma van Mercedes-Benz para isso. A van foi capaz de processar a entrada visual das câmeras e fornecer comandos para o volante, acelerador e freios, dirigindo a velocidades de até 96 km/h. Isso foi alcançado usando técnicas inovadoras de “4D Vision“, que envolveram a extração de bordas de uma imagem e as analisando, levando em consideração o atraso de tempo.
Nos Estados Unidos, o projeto de veículo autônomo da DARPA (ALV) produziu veículos dirigidos por combinações de LIDAR, visão computacional e redes neurais artificiais. As viagens automotivas semi-autônomas de longa distância também foram realizadas pela Universidade Carnegie Mellon e pela Universidade de Parma .
Fundada em 2004, o DARPA Grand Challenge incentivou o desenvolvimento de carros autônomos, oferecendo US$ 1 milhão para a equipe cujo veículo robótico navegasse com sucesso em uma pista de obstáculos. Nenhum competidor conseguiu completar o desafio inaugural.
No entanto, em 2005, cinco veículos completaram a corrida para um primeiro prêmio de US$ 2 milhões. O vencedor do primeiro lugar desses concorrentes bem sucedidos foi o Stanley, veículo projetado pela Universidade de Stanford e pela Volkswagen, utilizando tecnologia adaptada do Stanford Cart.
Em 2007, o caminho foi alterado para um ambiente urbano, exigindo que os concorrentes se integrassem ao tráfego. Seis equipes completaram este desafio, lideradas pela Carnegie Mellon’s Tartan Racing, com os concorrentes de Stanford e Virginia Tech seguindo logo atrás.
Outros competidores, no entanto, estiveram envolvidos em acidentes -os concorrentes do MIT e Braunschweig colidiram, e outro concorrente se perdeu e bateu num pilar. Este evento deu origem ao software preditivo e de tomada de decisão, necessário para que os veículos autônomos operem entre outros carros, bem como a conscientização pública sobre os erros que esse software pode apresentar.
Nos últimos 10 anos, a pesquisa automotiva sobre carros autônomos continuou a mudar de universidades para chewgar aos fabricantes, já que empresas como BMW, Volkswagen e GM começaram a testar seus próprios veículos auto-dirigidos.
A pesquisa acadêmica continuou na Universidade de Parma, no Karlsruhle Institute of Technology e na Induct Technology da França. No entanto, o mais conhecido -e talvez o mais avançado- desses projetos é o Google Self-Driving Car , iniciado em 2009.

A equipe do Google inclui membros líderes de equipes do desafio DARPA vencedoras. Seu software combina os dados da LIDAR e do Google Maps para reconhecer a localização e, em seguida, usa detecção visual e radar para identificar veículos, pedestres e objetos nas proximidades.
Estes dados são processados para planejar uma trajetória segura para o veículo, aproveitando sofisticados computadores. O objetivo é imitar o comportamento de um motorista humano padrão. Em outubro de 2015, a Tesla Motors lançou uma atualização de software para o seu veículo Modelo S, permitindo um recurso chamado “Piloto Automático“. O software permite que o carro siga de forma autônoma uma pista, além de trocar de faixa ou estacionar sozinho. Essas habilidades colocam o Modelo S entre os primeiros carros “auto-dirigidos” publicamente disponíveis
Os veículos do Google são quase totalmente autônomos, e o Tesla exige apenas a captação de dados mínima, mas eles ainda não estão sem um humano no banco do motorista, para atender aos requisitos de segurança e legislação. Com a automação ficando mais e mais confiável, o próximo passo é garantir que nenhum humano seja necessário para conduzir o veículo.
No ano passado, os carros do Google acumularam experiência de condução coletiva de 75 anos, e mais de 47 milhões de quilômetros conduzidas no piloto automático dos Tesla.
Enquanto vários acidentes ocorreram, incluindo fatal envolvendo um Tesla recentemente, a segurança em relação aos motoristas humanos é notável. No entanto, um estudo da RAND mostra que o teste de condução autônoma pode não ser suficiente para garantir a confiança que a legislação exige.
Além de teoricamente prevenir acidentes, a remoção da necessidade de motoristas humanos abriria portas para a locomoção de deficientes, idosos e outros que não podiam dirigir. Em muitos lugares, o acesso a um veículo não é um privilégio, mas uma necessidade e a não necessidade de um motorista pode dar independência para aqueles que realmente precisam disso.

O projeto multinacional i-Game vem desenvolvendo tecnologias desde 2013 para a comunicação entre veículos e com infra-estrutura para fornecer melhores informações aos sistemas de condução autônoma, voltando ao conceito de “estrada inteligente” do século XX. Em uma escala menor, a Toyota e Uber anunciaram parceria nesse sentido.
Colocar nas ruas veículos auto-dirigidos é o que quase todos os principais fabricantes de automóveis estão ativamente planejando. A GM está expandindo sua divisão canadense de pesquisas para se concentrar em tecnologia de veículos autônomos, e incluiu alguns controles semi-autônomos no Bolt 2017.
A Ford se associou com a Velodyne LIDAR para desenvolver carros que podem lidar com uma variedade de condições adversas, além de se associar com empresas menores para criar um produto “acessível para as massas e melhorar a vida das pessoas”. Estima que a tecnologia necessária estará disponível já em 2012. A tecnologia “Active Park Assist” já está disponível nos veículos da Ford desde 2013, usando múltiplos sensores para estacionar o veículo de forma autônoma, sem o motorista dentro.
A consultoria IHS Automotive estima que 76 milhões de veículos com algum nível de autonomia serão vendidos até 2035. À medida que as perspectivas de estradas adequadas aos carros autônomos se tornam cada vez mais concretas, a comunidade e curiosidade em torno de carros auto-dirigidos cresceu.
Os próximos passos deste sonho envolvem obstáculos legais, muitos testes e desenvolvimento adicionais, e novas formas de ver as coisas e o negócio “automóvel”. Ninguém mais vai precisar desembolsar pequenas fortunas para ter um carro próprio, que passa a maior parte do tempo parado e se desvalorizando. Embora os veículos autônomos tenham sido previstos como “para breve” desde a década de 1950, eles agora parecem estar apenas no horizonte. Com o apoio da indústria automotiva e dos gigantes tecnológicos, o futuro dos carros auto-dirigidos parece mais próximo do que nunca. Menos no Brasil…